![Solution de caméras séparées en prévision[5].png](https://www.graph-id.fr/wp-content/uploads/2021/08/Comment-les-cameras-stereoscopiques-peuvent-completer-le-lidar-pour-de.png)
Comment les caméras stéréoscopiques peuvent compléter le lidar pour de meilleurs systèmes avancés d’aide à la conduite automobile
L’imagerie stéréoscopique peut servir d’alternative ou de système redondant au Lidar pour l’ADAS ou des niveaux d’autonomie plus élevés.
L’exactitude et la précision de la distance sont des éléments cruciaux des systèmes avancés d’aide à la conduite (ADAS) efficaces ou des niveaux d’autonomie plus élevés. L’une des technologies de pointe à cet effet est le LIDAR, cependant, il est encore trop cher pour ces applications.
Grâce aux progrès de l’imagerie par paires stéréo, la précision et la précision des distances peuvent être exploitées en triangulant les caméras, qu’elles soient visibles ou thermiques, pour créer des cartes de perception 3D des objets de la scène, ou idéalement, en tant que système redondant avec LIDAR pour les niveaux supérieurs de autonomie. Grâce aux récentes percées et avancées de la technologie stéréoscopique, les caméras couplées en stéréo peuvent être placées pratiquement n’importe où sur le véhicule avec la possibilité de régler et de recalibrer automatiquement les caméras quelles que soient la météo, les conditions atmosphériques ou même une route cahoteuse.
Pourquoi l’imagerie thermique ?
Thermique les caméras ont la capacité de détecter la chaleur, ou l’énergie infrarouge, produite et réfléchie par tout sur terre, elles peuvent donc voir beaucoup plus loin que les phares la nuit. Thermique La détection excelle dans les situations de conduite où d’autres technologies de capteurs peuvent être mises à l’épreuve, y compris les conditions de faible visibilité et de contraste élevé : la nuit, les ombres, le crépuscule ou le lever du soleil, ou face au soleil direct ou à l’éblouissement des phares. En tant que modalité de détection passive, thermique n’est pas affecté ou aveuglé par d’autres capteurs actifs, y compris le LIDAR ou le radar, et est efficace dans des conditions météorologiques difficiles telles que le brouillard, la fumée et la poussière.
Améliorer la précision de la détection en identifiant les obstacles routiers en temps réel
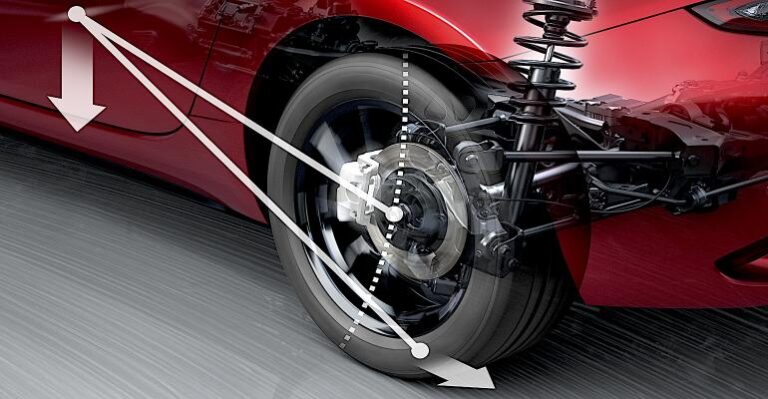
L’imagerie stéréoscopique fonctionne de manière similaire à la vision humaine en ce sens qu’elle est basée sur la triangulation des rayons, dans ce cas, des rayons visibles et/ou thermiques, à partir de deux ou éventuellement plusieurs points de vue, fournissant une perception de la profondeur en calculant la distance à différents objets dans une scène donnée.
Pour atteindre des niveaux élevés de connaissance de la situation, des capteurs de vision tels que l’imagerie visible ou thermique qui ont une résolution plus élevée et des données plus précises sur chaque objet de la scène sont nécessaires. Autrement dit, le nombre de pixels sur un objet est essentiel pour comprendre que l’objet est là (probabilité de détection) et déterminer ce qu’est l’objet (classification).
Chris Posch, directeur de l’ingénierie, automobile, Teledyne FLIR (à gauche) Daniel Brosh, ingénieur système en chef d’équipe, prospective (à droite)
Plus le nombre de pixels est élevé, mieux c’est. Simagerie téréoscopique utilisant Les caméras thermiques et à lumière visible peuvent grandement améliorer la sécurité des ADAS et des véhicules autonomes grâce à une meilleure connaissance de la situation la nuit, dans des scènes à contraste élevé telles que les ombres et dans des conditions météorologiques défavorables et de mauvaises conditions d’éclairage.
Le LiDAR, quant à lui, devra être fusionné avec une caméra afin d’obtenir une connaissance de la situation sur de longues distances, ce qui nécessitera une puissance de calcul et des ressources supplémentaires, par opposition à la stéréo qui utilise déjà des capteurs de vision dans le cadre de la technologie.
En plus de la détection d’objets, les paires stéréo thermiques peuvent également être utilisées comme un couche alternative et redondante de données de perception 3D. En déterminant la distance et la forme des objets autour du véhicule, ces données peuvent également être utilisées pour accélérer le développement et les tests des futures fonctionnalités ADAS/AV, notamment le freinage d’urgence automatique (AEB), l’assistance au maintien de voie, le régulateur de vitesse actif, ainsi que systèmes de pilotage automatique trouvés dans des niveaux plus élevés de véhicules autonomes.
Les caméras thermiques stéréo sont déjà développées sur le marché et peuvent constituer un outil précieux pour les avions, les bateaux et, bien sûr, les véhicules au sol sans pilote et autonome. Plus précisément, les entreprises ont déjà développé des systèmes de vision de véhicule autonome qui s’appuient à la fois sur des caméras stéréo visibles et thermiques pour fournir une meilleure connaissance de la situation.
Pour quelques centaines de dollars, l’imagerie stéréoscopique permet à ceux qui intègrent la technologie d’économiser une somme importante par rapport au LIDAR – qui peut se chiffrer par milliers. Ces économies sont ensuite répercutées sur le consommateur, entraînant une adoption accrue.
Bien que les constructeurs automobiles autonomes, les entrepreneurs, les ingénieurs et les développeurs aient fait des progrès significatifs dans la création de véritables voitures autonomes, de nombreux défis demeurent. Ces défis ne sont pas insurmontables. En continuant d’itérer, de tester et de valider, y compris la mise en œuvre de technologies émergentes telles que la vision stéréo thermique, ce n’est qu’une question de temps avant de voir le premier véhicule entièrement autonome au monde.