Comment construire un meilleur système de câbles pour les robots multi-axes
David Sandiland d’igus explique comment les chaînes porte-câbles télescopiques triflex TRX permettent d’économiser de l’espace sur le robot et d’assurer une longueur de rétraction jusqu’à 40 % – et pourquoi c’est important.
Les robots industriels deviennent de plus en plus agiles et flexibles. À mesure que la technologie des robots progresse, la chaîne d’approvisionnement doit réagir en conséquence. Vous ne pouvez pas avoir un robot avec une plus grande capacité uniquement pour être paralysé par des câbles encombrants. Pour garantir le guidage sûr, simple et compact des câbles des robots industriels, igus a développé une chaîne porte-câbles triflex TRX à quatre dimensions.
Les câbles sont placés dans la chaîne en forme de spirale et sont guidés en toute sécurité dans le mouvement à l’aide de la chaîne. De plus, les câbles et flexibles sont fixés en place au milieu du TRX afin qu’ils ne quittent pas leur position lorsque la chaîne est tirée.
Nous avons rencontré David Sandiland, responsable du dépannage et de l’amélioration des processus en robotique et automatisation chez igus. Il a expliqué comment la technologie des câbles s’est développée pour correspondre aux progrès de la robotique.
Design News : Comment les progrès de la robotique créent-ils le besoin de nouveaux développements dans les câbles ?
David Sandiland : Il s’agit d’un changement d’« empreinte ». La réalité des nouveaux robots et même des robots déjà déployés sont que les fournisseurs de pièces périphériques se battent tous pour le même espace et c’est l’axe 3. La majorité des systèmes de rétraction sont montés sur un ensemble de trous au 3ème axe et souvent, l’intégrateur ou l’extrémité -l’utilisateur veut que l’immobilier pour les boîtes de jonction et les banques de vannes. Ceci est particulièrement courant avec les robots de manutention qui ont de grandes pinces et ont besoin de plusieurs lignes aériennes et câbles de capteurs pour provenir d’un point de jonction à l’axe 3. Le TRX nous permet d’offrir une forme de rétraction tout en n’occupant pas le quartier « à loyer élevé » du bras robotique.
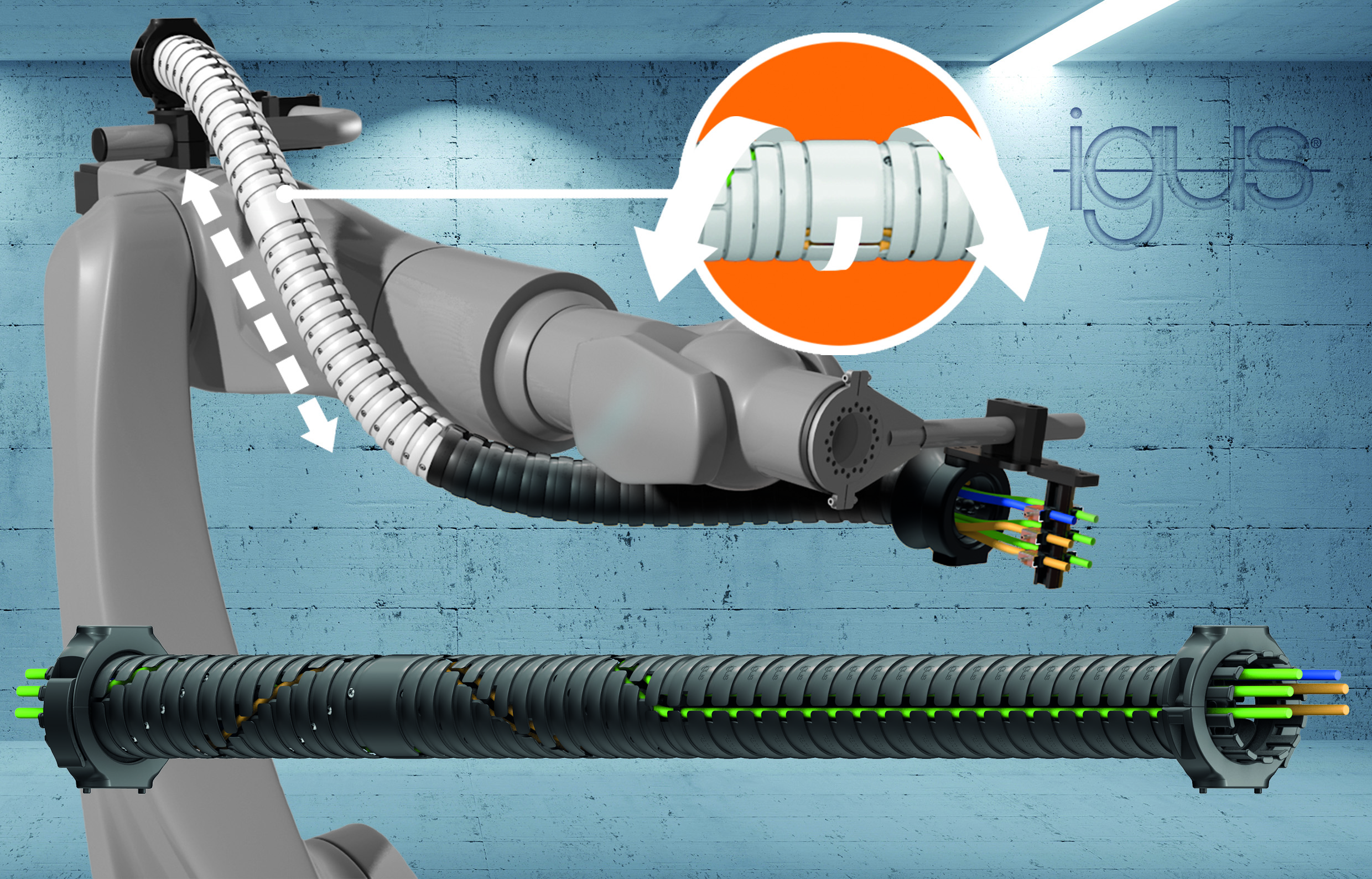
Le système TRX d’igus a été conçu pour économiser de l’espace sur le troisième axe du robot et garantir une longueur de rétraction jusqu’à 40 %.
DN : Expliquez la chaîne énergétique Triflex R et son fonctionnement.
David Sandiland : Triflex R est un porte-câbles tridimensionnel qui intègre les avantages d’un porte-câbles 2D standard, comme la protection du rayon de courbure et la séparation intérieure, mais ajoute également d’autres fonctionnalités comme une butée de torsion et une conception à rotule. La combinaison de ces quatre caractéristiques est unique à triflex R et conduit à une meilleure protection des câbles et à une réduction des temps d’arrêt. Une grande partie de la gestion des câbles du robot est effectuée à l’aide d’un tuyau ondulé, mais le tuyau ondulé résiste à la flexion et à la torsion. Il n’offre pas non plus de séparation intérieure et ne peut pas être allongé/raccourci ou réparé sans remplacer le tube entier. Triflex R peut faire toutes ces choses et l’essentiel est qu’il permet aux clients d’économiser de l’argent en temps d’arrêt, en temps de maintenance et en gaspillage.
DN : Étant donné que la contraction continue entraîne une contrainte sur les matériaux des câbles, comment igus a-t-il testé le matériau sous une contrainte continue ?
David Sandiland : Les systèmes à bandes sont quelque chose que nous utilisons déjà dans certains de nos systèmes de rétraction et nous avons effectué des tests approfondis pour trouver des bandes qui fournissent la bonne quantité de tension ainsi qu’un long cycle de vie. Nous avons des solutions baguées dans nos systèmes de rétraction depuis environ cinq ans maintenant. Dans le cas du TRX, les bandes se comporteront de manière similaire à celles des systèmes de rétraction. Igus dispose d’un grand laboratoire d’essais à notre siège social à Cologne en Allemagne. Nous avons plusieurs robots et appareils de test que notre équipe de développement de produits utilise pour tester nos nouvelles conceptions. Nous testons actuellement un système TRX sur l’un de nos robots et je peux dire qu’à ce jour les résultats sont très positifs ! Nous effectuerons ce test en interne pendant plusieurs millions de cycles avant de le mettre à disposition sur le marché. Il est également prévu de tester TRX en partenariat avec certains de nos partenaires automobiles en Europe. Notre objectif est que TRX soit disponible sur le marché d’ici le quatrième trimestre.
DN : Comment la réduction de poids affecte-t-elle les performances du robot ?
David Sandiland : Il y a une lutte pour l’immobilier sur le robot de l’axe 3. C’est également vrai en ce qui concerne la charge utile. Chaque robot a une charge utile maximale, et tout ce qui est ajouté au robot contribue à réduire les capacités du robot. Lorsque vous ajoutez des périphériques tels que la gestion des câbles ou des boîtes de jonction à un robot, cela limite la charge utile disponible du robot en ce qui concerne la taille de l’outillage et le travail qu’il effectue. En éliminant le système de rétraction, vous réduisez le poids total du système de gestion des câbles jusqu’à 10 kg. C’est une quantité importante lorsque les ingénieurs conçoivent des robots d’une capacité d’environ 40 kg ou 50 kg.
DN : Ce développement de câble a-t-il des applications au-delà de la robotique ?
David Sandiland : À ce stade, il est difficile de dire si nous verrons des applications non robotiques graviter vers cette solution, mais je peux vous dire que nous collaborons fréquemment avec des entreprises sur des projets triflex R pour des applications non robotiques. Ces applications vont des manèges de parcs d’attractions aux équipements médicaux en passant par les machines-outils. Dans cet esprit, je suis sûr qu’il y aura une opportunité sur la route d’intégrer TRX dans une application non robotique.