Spécification et qualification des capteurs pour la navigation robotique
Pour obtenir une précision optimale dans la navigation du robot, vous devez choisir les bons capteurs.

Pour les applications de navigation robotique, il est important de disposer de données précises sur la position et le cap, fournies par plusieurs capteurs. Si votre robot ne sait pas où il se trouve ou dans quelle direction il pointe, il sera difficile d’aller là où vous le souhaitez. Outre la précision, les concepteurs doivent également tenir compte de facteurs tels que le coût, la consommation d’énergie, l’effort d’intégration et la taille de l’appareil pour s’assurer qu’ils choisissent le composant optimal pour leurs besoins.
Sommaire
Erreurs d’assemblage
Lorsqu’un robot se déplace de manière autonome, les erreurs de ses capteurs de position s’aggravent avec le temps. Par exemple, pour un robot aspirateur autonome, toute mesure de la direction vers laquelle il pointe deviendra inévitablement imprécise. Plus le robot s’éloigne d’une position connue, plus l’erreur dans les données de position est accumulée par cette erreur directionnelle.
Pour obtenir les résultats les plus précis, il est souvent préférable d’utiliser plusieurs capteurs de différents types et de combiner leurs différents flux de données. Pour l’aspirateur, nous pourrions utiliser des encodeurs de roue pour mesurer la distance parcourue par le robot, ainsi que des capteurs de débit optiques pour fournir des informations de mouvement supplémentaires à des fins de comparaison et d’étalonnage. Ensuite, une unité de mesure inertielle (IMU) peut fournir indépendamment des données sur l’orientation, l’accélération latérale et la vitesse angulaire.
En mettant tout cela ensemble, le bon logiciel peut déterminer la position du robot et la direction dans laquelle il se déplace, ainsi que fournir des informations appropriées sur les erreurs probables dans ces données.
Juste les faits
Nous savons que la précision est importante et que les erreurs s’aggravent, mais comment choisir les bons capteurs pour notre application de navigation robotique ?
Comme pour la plupart des problèmes de conception, il est souvent préférable de travailler à rebours à partir du résultat souhaité. La spécification de conception de notre robot doit définir le niveau de précision requis et le type d’erreurs acceptables. Armés de ces informations, nous pouvons alors déterminer les performances dont nous avons besoin pour chaque capteur et les tolérances que nous pouvons gérer sans compromettre la conception globale.
En théorie, nous pourrions le faire en lisant des fiches techniques et en comparant les différentes erreurs minimales et maximales citées. Nous pourrions ensuite combiner ces chiffres pour obtenir des chiffres d’erreur globaux pour notre robot aspirateur.
C’est l’approche la plus courante, mais nous pouvons faire mieux.
Caractériser en détail
Pour faire les meilleurs choix de conception, nous devons avoir une vue complète des caractéristiques de chaque capteur et cartographier les erreurs et leur impact attendu.
La meilleure façon de rendre compte de ces attributs de capteur est de les étudier avec des données et de caractériser comment leur comportement change dans toutes les circonstances possibles. Idéalement, nous aurions une collecte de données complète, composée de mesures pour chaque permutation possible de métriques clés, y compris l’orientation, le mode de fonctionnement et la température.
Ce système automatisé de collecte de données nécessiterait un équipement adapté. Les permutations sont probablement la partie la plus difficile de ce système à mettre en place. Les rotations sur un seul axe peuvent être effectuées avec un cardan de précision. Ensuite, mettre ce cardan à axe unique perpendiculaire à un autre permet un mouvement complet sur trois axes.
Des PCB personnalisés peuvent être conçus pour communiquer avec les capteurs, modifier les modes de fonctionnement et collecter des données. Créer suffisamment de cartes pour atteindre un nombre statistiquement significatif de capteurs testés garantit que nous pouvons obtenir des données adéquates pour caractériser complètement le capteur typique.
Ensuite, nous pouvons placer ces cartes et cardans dans une chambre à température contrôlée, et modifier leur température en même temps que les cardans passent par différentes positions et les capteurs leurs modes de fonctionnement. Pour poursuivre l’étude des capteurs, une chambre de chaleur et d’humidité peut vieillir artificiellement ces cartes, et une bobine de Helmholtz peut être utilisée pour mesurer les effets des champs magnétiques changeants. Ajoutez un ordinateur pour faire fonctionner ces systèmes, enregistrer les données et le logiciel pour les analyser, et nous avons un système complet de caractérisation des capteurs.
Aperçus détaillés des données de test
Bien que ce système soit complexe à mettre en place, les résultats fournissent des informations bien au-delà de ce que n’importe quelle fiche technique peut nous donner. Par exemple, voir la figure 1, qui montre la relation entre la polarisation du gyroscope, ou le décalage de taux zéro (ZRO), pour plusieurs capteurs testés. ZRO est l’angle qu’un capteur signale lorsqu’il est au repos et devrait idéalement lire zéro degré.
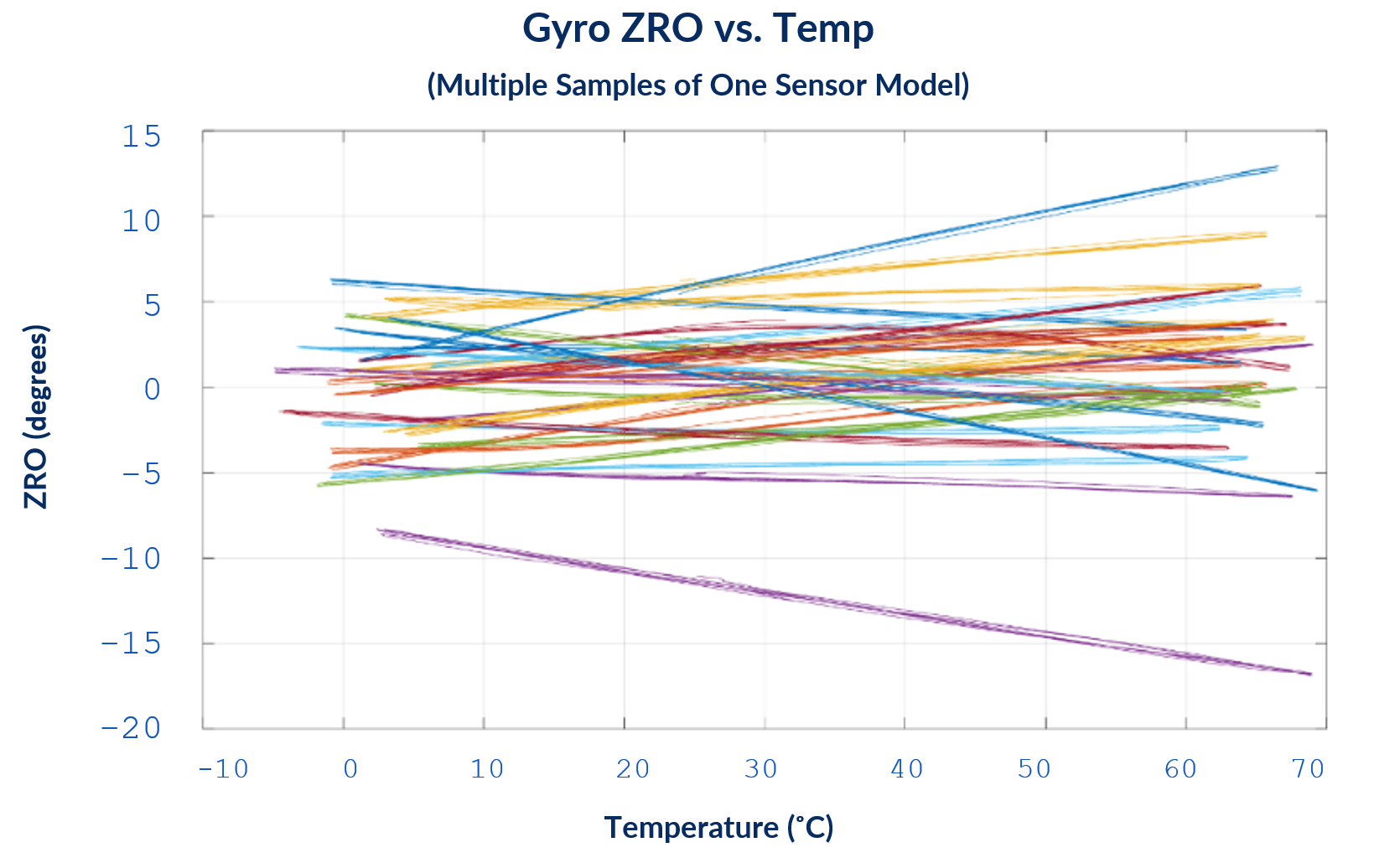
Exemples de variations de la relation ZRO/température.
Chaque ligne de la figure 1 montre l’effet d’un changement de température sur ZRO pour un seul capteur – tous les capteurs sont du même modèle de produit. Chaque capteur se comporte différemment lorsque la température change. Certains sont fortement positifs, d’autres négatifs, certains sont moins influencés par la température, mais tous ont des plages d’effet différentes.
Le même niveau de collecte de données détaillées peut être effectué avec les autres paramètres (tels que le décalage, le gain, l’inclinaison, la rotation, le bruit, la non-linéarité) avec des conditions variables de température, de tension, de vieillissement et de mode de fonctionnement.
Pour une application donnée, certains facteurs seront plus importants que d’autres. Par exemple, si notre robot aspirateur doit fonctionner dans un foyer domestique, la plage de températures de fonctionnement sera probablement faible – la plupart des gens gardent leur maison à quelques degrés d’un chiffre typique. Alternativement, on peut s’attendre à ce qu’un robot tondeuse à gazon fonctionnant à l’extérieur fonctionne avec précision sur une plage de températures beaucoup plus large en fonction des conditions météorologiques.
Certains de ces effets peuvent être modélisés et compensés dans notre conception, et certains reflètent des limitations qui dictent les limites de performance du système. Nous devons peser soigneusement les caractéristiques des capteurs par rapport à des facteurs externes tels que le coût et l’effort d’intégration, afin de faire la meilleure sélection de capteurs pour l’application robotique. Grâce à la caractérisation complète des capteurs, nous allons bien au-delà de ce qui est fourni dans la fiche technique et pouvons nous assurer que nous disposons de suffisamment d’informations pour prendre les bonnes décisions de conception.
Les systèmes robotiques sont une bête complexe, nécessitant le bon mélange de pièces mécaniques, électriques et programmées soigneusement sélectionnées. Il y a tellement de combinaisons d’endroits où des choix doivent être faits et les choses peuvent mal tourner. Le livre blanc « Navigating the Complexities of Robotic Mapping » de CEVA vise à guider les utilisateurs dans l’obtention des meilleurs capteurs, l’élaboration du bon plan de test, la collecte de données et la recherche d’informations dans l’analyse, afin qu’un système de capteurs adapté puisse être conçu pour votre robot. Voici le livre blanc.