Vous voulez que votre robot se déplace en toute sécurité aux urgences ? Utiliser ce système de navigation
Les chercheurs ont formé un algorithme pour aider les machines à rester à l’écart en utilisant des vidéos de scénarios réels dans les services d’urgence des hôpitaux.
L’un des principaux défis des robots travaillant à proximité des personnes est de créer des systèmes de navigation suffisamment sophistiqués pour garantir que les machines gardent une distance de sécurité.
Un domaine dans lequel l’assistance robotique pourrait être extrêmement utile dans la salle d’urgence (ER) d’un hôpital, qui est généralement animée de mouvements et d’activités humains.
Pour s’assurer que ce type d’assistance robotique peut être effectué de manière sûre et efficace, les informaticiens du L’Université de Californie à San Diego (UCSD) a développé un système de navigation plus précis pour négocier des environnements cliniques très fréquentés, avec un accent particulier sur les services d’urgence, ont-ils déclaré.
En fait, l’équipe, dirigée par le professeur Laurel Riek et Ph.D. Angelique Taylor, étudiante, ont été inspirés par des discussions avec des cliniciens sur plusieurs années pour voir comment intégrer au mieux les robots dans ces types d’environnements. Ce que les médecins, les infirmières et les autres membres du personnel leur ont dit, c’est que les robots pourraient être d’une aide cruciale pour la livraison de fournitures et de matériel aux urgences.
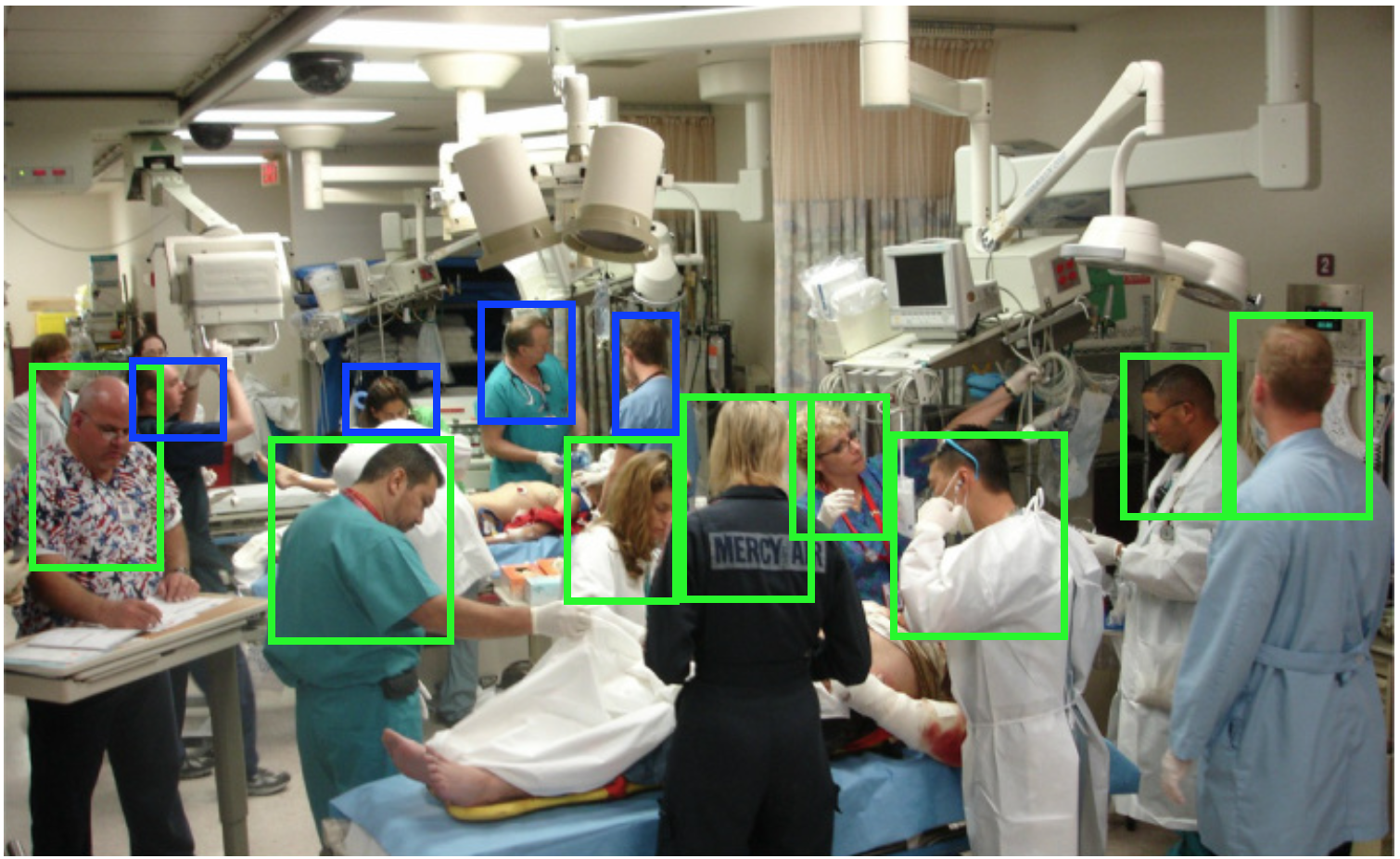
Cette photo montre un groupe de professionnels de la santé s’occupant d’un patient aux urgences. Un nouveau système de navigation ordonne aux robots de rester à l’écart de ces cliniciens afin qu’ils puissent travailler à leurs côtés dans les services d’urgence tout en restant à leur service.
Cependant, ces types de tâches exigeraient que les robots sachent comment éviter de perturber les scénarios dans lesquels des patients dans des conditions critiques ou graves sont traités par des professionnels de la santé, a expliqué Riek.
« Pour effectuer ces tâches, les robots doivent comprendre le contexte des environnements hospitaliers complexes et les personnes qui les entourent », a-t-elle déclaré. Riek est professeur d’informatique et de médecine d’urgence à l’UCSD.
À cette fin, l’équipe a construit le système de navigation, appelé Safety-Critical Deep Q-Network (SafeDQN), à l’aide d’un algorithme créé sur la base d’observations de l’environnement animé des urgences, ont déclaré les chercheurs. L’algorithme prend en compte le nombre de personnes regroupées dans un espace et la rapidité et la soudaineté avec lesquelles elles se déplacent.
En effet, lorsqu’un patient entrant aux urgences prend une tournure drastique pour le pire, une équipe de professionnels affluera vers ce patient pour lui apporter de l’aide avec des mouvements qui sont généralement rapides, alertes et précis, ont déclaré les chercheurs. Le système de navigation devait reconnaître ces types de mouvements et les contourner, en se déplaçant alternativement autour des groupes de personnes et en restant à l’écart, ont-ils déclaré.
« Notre système a été conçu pour faire face aux pires scénarios pouvant survenir aux urgences », a expliqué Taylor dans un communiqué de presse. Elle est chercheuse au laboratoire de robotique de santé de Riek au département d’informatique et d’ingénierie de l’UCSD.
Pour former l’algorithme, les chercheurs ont utilisé des vidéos YouTube de documentaires et d’émissions de télé-réalité qui décrivent des scénarios du monde réel aux urgences, tels que « Trauma: Life in the ER » et « Boston EMS », ont-ils déclaré. Ils mettent plus de 700 de ces vidéos à la disposition d’autres équipes de recherche pour former des algorithmes et des robots liés à une navigation similaire.
Test du système
Pour tester le fonctionnement de leur algorithme de navigation dans une salle d’urgence réelle, les chercheurs ont testé le SafeDQN dans un environnement de simulation, où ils ont déclaré qu’il générait le chemin le plus efficace et le plus sûr autour des travailleurs humains par rapport à d’autres systèmes de navigation robotique de pointe.
Les résultats de leurs recherches se trouvent dans un article (PDF) que l’équipe présentera à la Conférence internationale sur la robotique et l’automatisation qui se tiendra à Xi’an, en Chine, à partir du 30 mai.
L’équipe prévoit de tester le système ensuite sur un robot réel travaillant dans un environnement réel en s’associant aux chercheurs de l’UCSD Health qui exploitent le centre de formation et de simulation en soins de santé du campus.
Les chercheurs envisagent également que les algorithmes pourraient également être utilisés par les robots pour naviguer dans des environnements complexes en dehors d’une salle d’urgence, ont-ils ajouté.